HKUST Robotics Team - The 14th Robot Design Contest 2022
Group 5 Fibotics - ARC (Automatic Racing Car)
Oct - Dec 2022
Technologies: STM32, Image Processing (Sobel), PID Control, RoboMaster M3508 Motors, C620 ESCs, Omniwheel Kinematics, CAN Bus, Embedded C
🎯 Game Task Overview
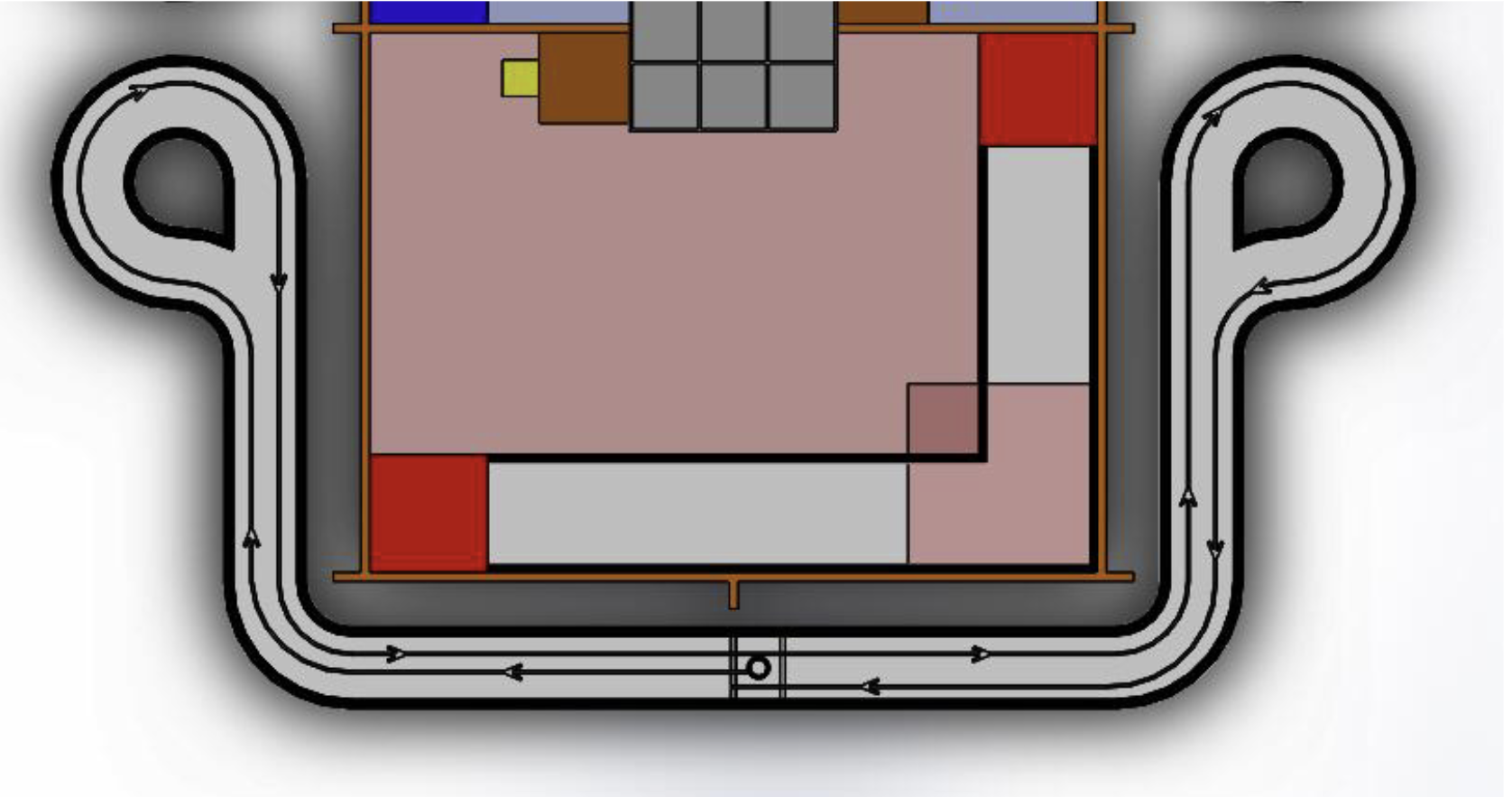
The Automatic Racing Car (ARC) must autonomously race on a designated track for four laps within 3 minutes. The faster team earns a Replacement Opportunity (a golden piece) for their TR. The ARC must follow the track without exiting; any lap where the robot leaves the track is not counted. The track may contain random obstacles (e.g., pieces dropped by TRs), and the ARC must avoid them.
📄 Download Full Game Rule (PDF) 📄 Game Introduction Video
Overview
The Automatic Racing Car (ARC) was designed to autonomously navigate a track and complete the tic-tac-toe challenge. As part of Team Fibotics (Group 5), I contributed to the software development, focusing on image processing, track sensing algorithms, and low-level motor control.
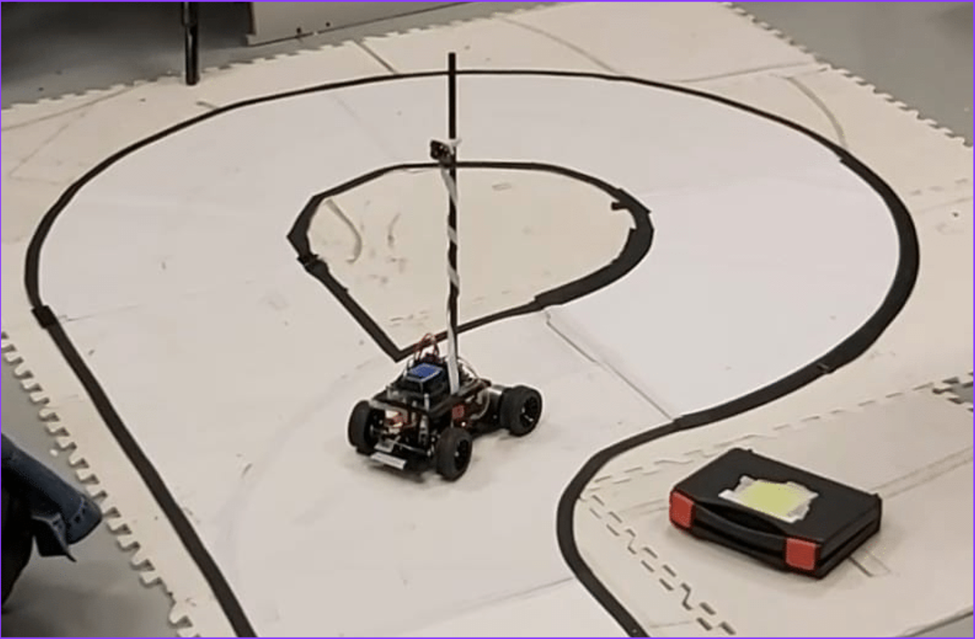
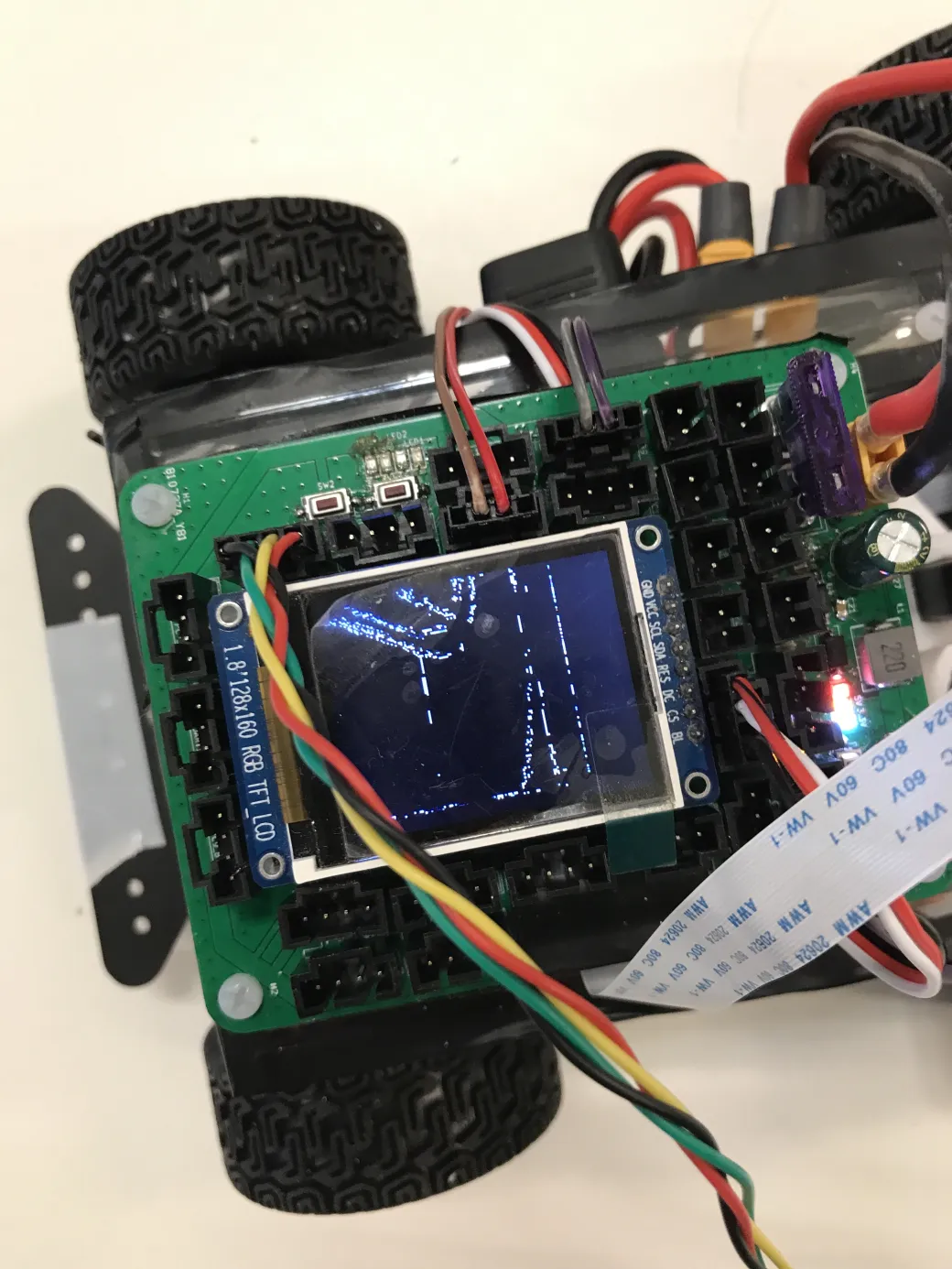
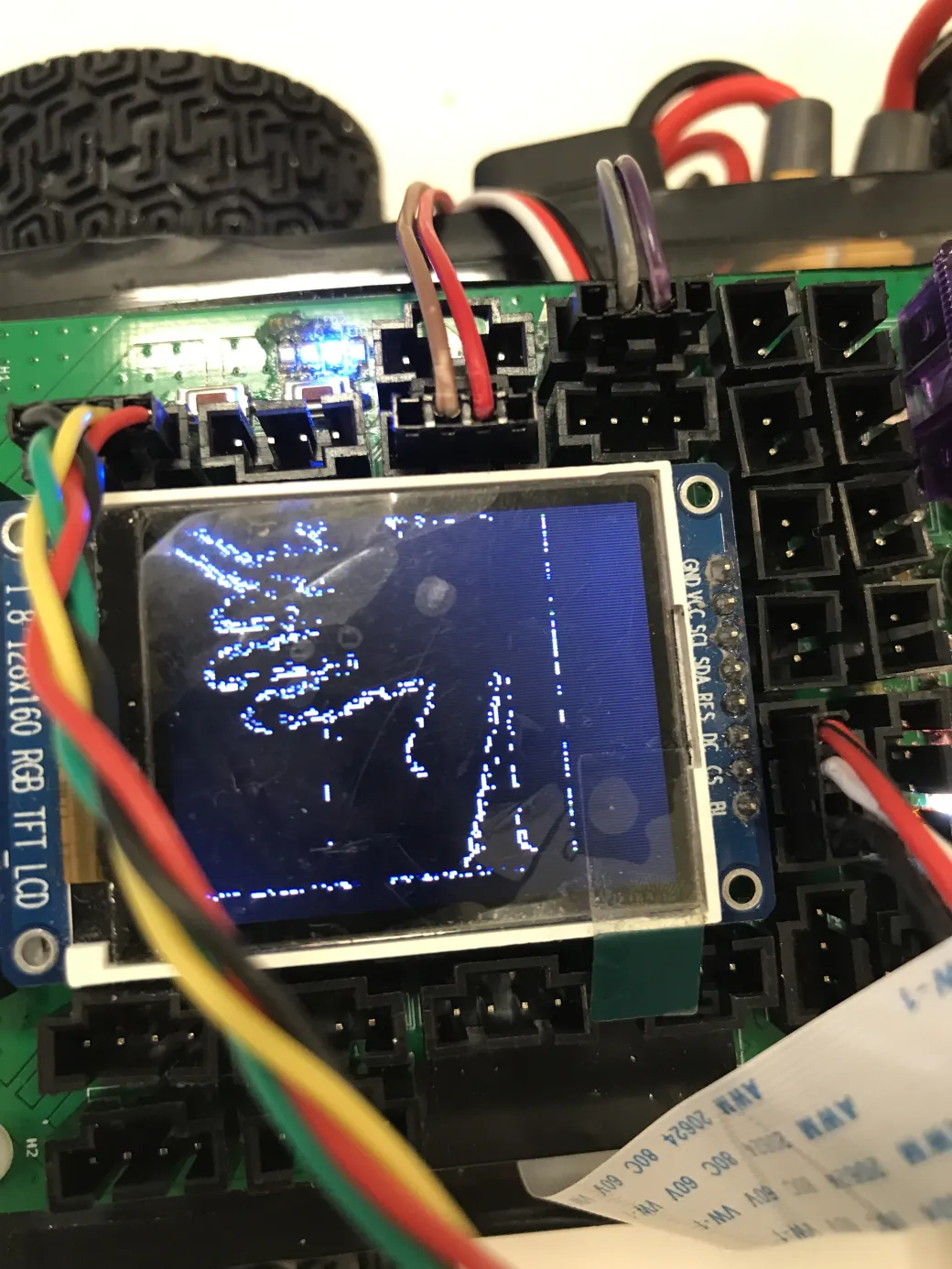
Image Processing
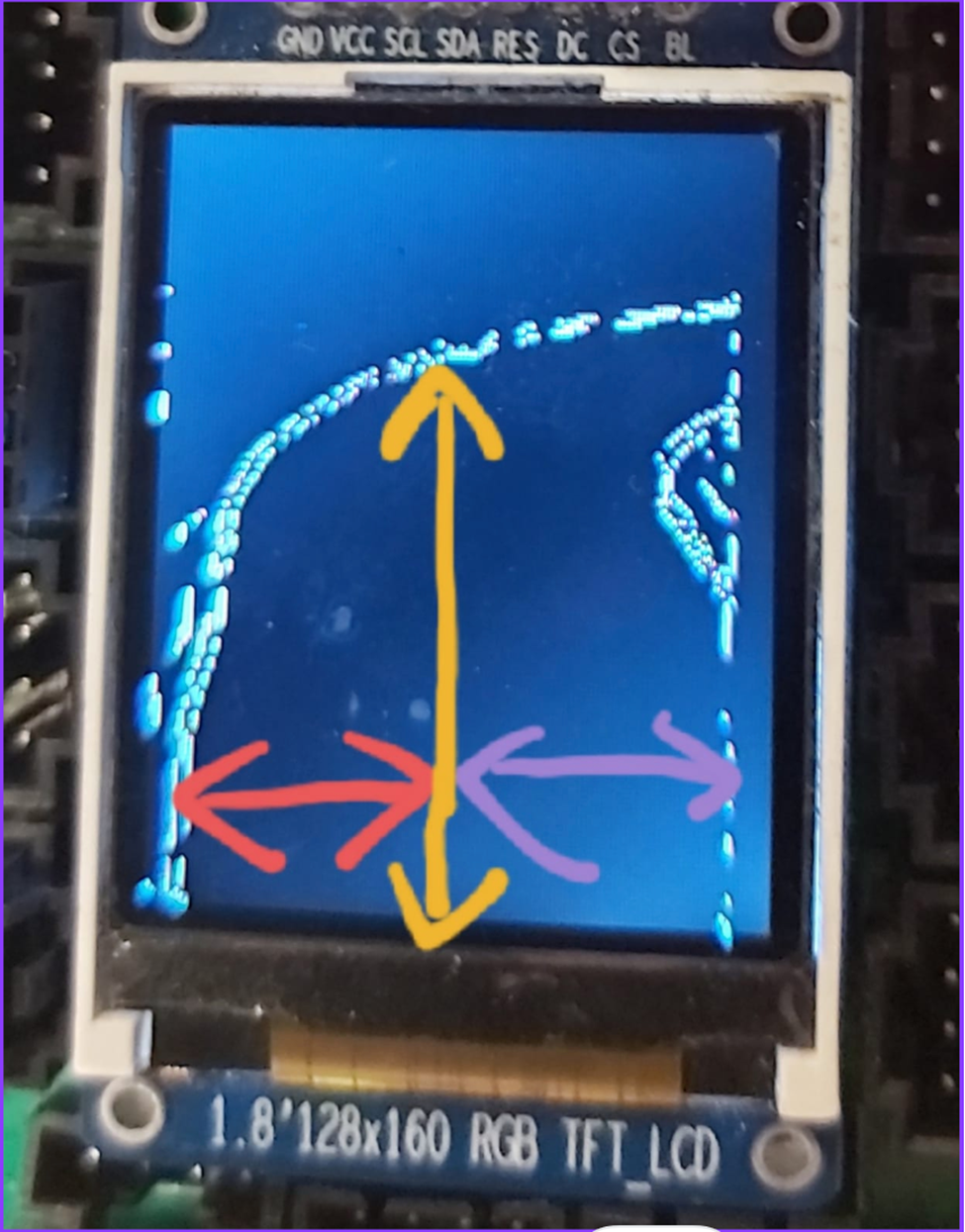
We used a Sobel filter to detect edges and filter out unwanted data for track sensing. Initially, filtering the entire image was too time-consuming and reduced the frame rate. To improve performance, we modified the algorithm to filter only the pixels needed for navigation, significantly increasing the ARC's responsiveness.
Track Sensing & Control
The ARC continuously calculated two critical parameters:
- The distance between the track's centre and the left/right borders.
- The distance to the edge in front of the robot.
Using these measurements, a PID algorithm adjusted the steering angle to keep the robot centered. The system also detected upcoming turns by analyzing changes in border distances, then decelerated and executed a controlled drift through the turn. Additionally, the ARC counted the number of turns to determine whether it should follow the left or right border.
Video Demonstrations
Awards & Recognition

- 🏆 HKUST Robotics Team - The 14th Robot Design Contest 2022 - 2nd Runner Up
- 🏅 HKUST Robotics Team - The 14th Robot Design Contest 2022 - Best Engineering Award